




ʱ�䣺2016-09-21 ���ߣ��º��� ��Դ���Ϻ�������ѧ�� ��������
����һ.����
������·������Ŀ����Ҫ�����ϵĵ�·��Ӫ��һ���ʺ��ڻ�������ʻԱ��ʻ����(�����˶�)ʱ����һ���ʺ�������/�ǻ�������·������(�����˶�)ʱ��һ�����ȵĺ��㹻������·������Ч�����ʺ��������Ӿ����.�û���еø������ɺͷ���.Ϊ�˴ﵽ���Ŀ��,�����ϸ���Ҫ������Һ͵������ƶ�����Ӧ�ĵ�·������,�ڴ����������������ҵ�Ļ�������Ҫ��ʱ,�ҹ����õ���������CJJ45-2006�����е�·������Ʊ���,��������������֮��Ӧ,����3.3.1�ͱ�3.5.1[1].���������е�����˵���˰��ղ�ͬ��·�ȼ��ͽ�ͨ����Լ���ҵ�ߵ��ӿ�״̬������,��·������Ϊ��·���նȼ���ֲ�Ϊ��ƻ���������/�ǻ�������ͨ�����������Ͱ�·�����ȼ���ֲ�Ϊ��ƻ����Ļ�������ʻԱ�Ľ�ͨ����Ϊ������������������.
�������������������ķ������ͬ,��ҵ�ߵ��Ӿ�״̬���˶�״̬Ҳ��ͬ,���ĵ��ӿ�������Ҫ�ﵽ��Ŀ��Ҳ��ͬ,�����Ҫ������ָ��Ҳ��ͬ,��Ҫ·�Ƶ����Ҳ����ͬ,���ʱ���ǵ�������ȻҲ�Ͳ�ͬ��.
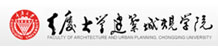
����������/�ǻ�������·����,���˵��۾���ע����·���ϵ��ϰ���Ͷ����������˵���ò�p����������,����Ҫ��ֱ��Ĺ���,Ҳ����Ҫˮƽ���ϵĹ���,Ҳ����˵����һƬ�����۲��߸����Ŀռ�����͵���,��ͼ1.���ڴ�ʱ������---���˺ͷǻ�������ʻԱ��Ҫ�۲�Ķ���ֱ�������ƽ��,������ƽ���ڷֱ��ṩ���˵������p���ε��罻��Ҫ����Ϣ����صĵ������ϰ������Ϣ,Ϊ�˱�֤�����Ӿ����ܵ�ʵ�ֺ���Ա�Ļ,�����·����Ҫ���ĵĹ���,���ܻ�ȡ������Ϣ.�����������,·�Ƶ��������õ�����ָ����Ӧ��·����ն�.
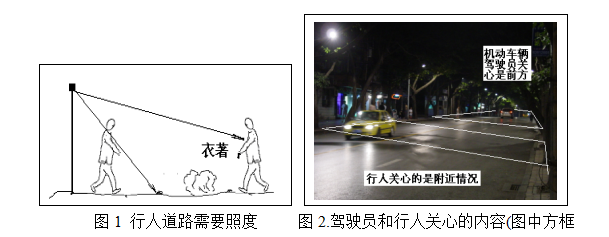
�����ڻ�������·����,��ʻԱ���۾������ע������ǰ��һ��Զ����(���ٶȵIJ�ͬ����)��·��,ʹ��һ���������---�ϰ��ᄀ��������Ӧ�Ĵ�ʩ,��֤�г���ȫ.��ʱ,��ʻԱû�б�Ҫ�۲�����������·��,ֻҪ���ĺۿ��복һ��������·��(������������60m�����·��)�ϵ���Ϣ,������û���ϰ���p��Ҫ������p·������ϵ�����ȵ�.��ʻԱ���۾���Ҫ�ۿ�������һƬ·�������������---·�����Ⱥ����ǵľ�����,һƬ���ȱȽϾ��ȵ�·��,���κ��ϰ��ﶼ��һƬ�������ȵ�·�汳���г��ֳ���,���,�����·��·�Ƶ��������õ�����ָ����·�������.��ͼ2.
����·������Щ��·�Ϸ��ӵ�������·�Ƶ����ֲ�ʮ�����,����˵���ľ��ǵõ��������˺ͷǻ�����Ϊ����·�ϵ����նȾ�����Ϊ�������ֲ������ڻ�����Ϊ���ĵ�·�������Ⱦ�����Ϊ�������ֲ��Ŀ��Ƿ����ͼ���.
������.��·�ƾ�������ߵı���
�����ƾ߹����ڿռ�Ĺ�ǿ�ֲ��ı�����ʹ�õ�����ϵͳ����,����ϵͳ����
�����ռ���������(X,Y,Z��)ϵͳ�͵ƾߵ���������ϵͳ֮��Ĺ�ϵ.����ϵͳ֮������ù�ϵû��ǿ���ԵĹ涨,��Ҫ�Ľ�����Ϊ�˱�������p��������ķ������ʶ�ϵķ���,�ɴ˿ɼ�,һ���ƾ���������������ϵͳ��������߿��Ա���.�����Ŀǰ�ڵƾ߹��ѧ�г��õ������������ϵͳ::A-��,B-��,C-������[2].
������ij��ƾ߾���ѡ����һ��ϵͳ���������Ĺ�ǿ�ֲ�,��������Ƿ���,Ҫ������������p�������ͷ�����ʶ(����).����û�а취��һ������ϵͳͬʱ�������������Ҫ�Ļ�,��ֻ������һ�ַ���,�ڵõ�һ��ϵͳ�Ŀռ��ֲ���,��ת������һ����Ҫ��ϵͳ�Ĺ�ֲ�,��������о��ͼ���.
��������Ŀǰʹ��C-��ϵͳ���еƾ�������ߵIJ����DZȽ��ձ����ʵ(C-�õIJ���ϵͳ�϶�),����Ŀǰ���������·�ƶ������ϵͳ�����Ŀռ��ǿ�ֲ�.���ڵ�·����ʵ�ʵ���ʶ��ʹ����,����C-��ϵͳ�����һЩ�����ϩp�����Ϻ������ϵ�����,�ر���������������жϵƾ߹�ֲ�����ʱ��ʮ�ֲ�����,��B-��ϵͳ�����ݱ�����һ�ֺõķ�ʽ,һ�ּ�������붼���������ϵͳ,��Ͳ���������ϵͳ֮���ת��---C-��ϵͳת����B-��ϵͳ����Ҫ,���������õ��Կ��Կ��ٽ����ⷽ���ת��,�dz����õ���Ҫʹ�õ�������ݺ�������״.��Ȼ,����B-��ϵͳ�IJ����������ܵõ���ӽ���Ҫ�Ľ��.
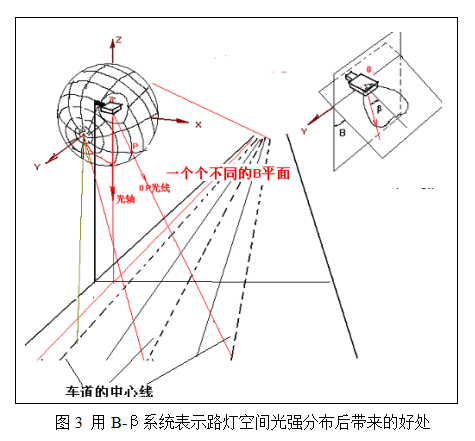
������·�����������,·���ϵ�ÿһ�����е�(3.5m��)����������Ҫ�ı�־��,��·�ϵ��նȺ����ȵļ���Ͳ����������������,��·�ϵ�������ȶ�Ҳ��ָ�������ϲ��������õ�����ֵ.����������ƾ߹��ɵ�ƽ��ǡǡ����B-��ϵͳ�е�һ��Bƽ��.�ɴ˿����������ķ���.
�����������,ʹ��B-��ϵͳ��,��·������������Ҳ�����˷���:����·�Ƶİ�װ�����Ǿ��Ǹı�B-��ϵͳ�е�B��,������Ȼʮ�ּ�,��ͼ3,[2].�����о�ʹ��B-��ϵͳ�еIJ�ͬBƽ���ϵĹ�ֲ�Ҫ��������·����Ҫ�����ֲ�.
������.·��õ����ն����ֲ��ļ���
����·����һ����ն����Զ�ƵĹ���,������ȡ���ڼ�������?���Բ���[3][4]�е�����,Ҳ����˵��õ����ڵ�������.ͼ4����·����һ���������������Ƶ�����.
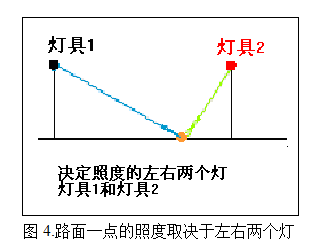
����Ϊ����·�ϵõ����ȵ��նȷֲ�,�ڿ��������ƹ��������,ÿ�����ڵ����ϵ��նȷֲ��������������״,�õ������ֵķֲ�.�����ǵƾ߹�ѧϵͳ��ƵĿ����Ժͷ����,ѡ��һ�ֵݼ��ֲ��DZȽ���ʵ�ĺͿ��е�,��ͼ5.
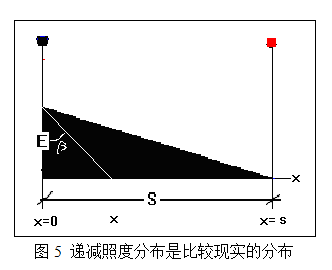
������B=0º��ƽ����:
�����ݼ����նȷֲ���дΪ:
����1(x=0)
����E=Eo(1-x/S)(x=x)
����0(x=S)
����ʽ��:E:·��������µ�Ϊx����
�����ϵ��ն�;
����Eo:���µ���ն�ֵ;
����s:���Ƽ�İ�װ����;
����x:·���ϵ���������.
���������ն����ǿ�Ĺ�ϵ:
����E=I�¡�cos3��/h2,(1)
����ʽ��,��:·��ij��Bƽ���ϵĽǶ�,��ͼ3;
����I��:����·����x�����Ĺ�ǿ;
����h:·�Ƶİ�װ�߶�.
������(1)ʽ��:
����I��:=E��h2/cos3��=Eo(1-x/S)h2/cos3�¡���(2)
����ȡ��һʱ�ı�ʽ,(2)ʽ��Ϊ:
����I��:=(1-x/S)/cos3�¡���(3)
������S/H=3.0�������:
����x/S=x/H��H/S=(tan��)/3
��������(3)ʽ��
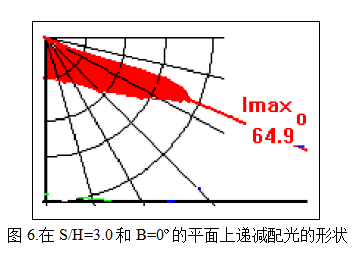
����I��:=(1-(tan��)/3)/cos3�¡���(4)
������(4)ʽ��ֵ�÷�ֵλ���ڦ�=64.9º.
�����ɴ˰���(4)ʽ�õ������������ͼ6��ʾ:
����������������,���и����������ƾ�����x=S��������,�õ�1/2�նȵĵ�һ���ڦ�=56.3º��λ����,��ͼ7.
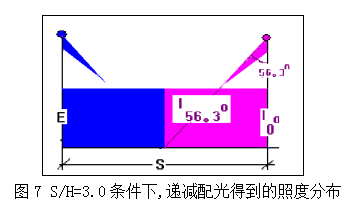
����������Bƽ��(��ͬ�ij��е�����)�����Ҳ�����ƴ���,��Ҫ����B�Ǵ������նȵļ���(��cosB�й�).
��������:�����˺ͷǻ�������·��Ҫ�õ��նȾ��ȷֲ���·�ƵĿռ��ǿ�ֲ�������һЩ������������״���������.���ڲ�ͬBƽ���ϵĦ�=0º�����ϵĹ�ǿ�����ƽ���е���С��ǿ,��½ǵ����Ӳ�������,Ȼ���ټ�С����.
������,·��õ����������ֲ��ļ���
����CJJ45-2006�ı�3.5.1�й涨�˻�������··������Ϊ��Ҫ����ָ��(���е��ն�ֻ��Ϊ�˲����ķ�������õ�,��ƽ���նȻ����ƽ������ʱ�ɽ���ʹ������-�նȻ���ϵ��).��·���ȵļ����Ե�ʮ����Ҫ.��Ϊ��·��ijһ�����ȵĹ���·�������ߵĽǶ��ǿ��Բ��ҵ�··����ϵ�rϵ����(����ϵ��)���йصĽǶȵķ�Χ�еõ�,���ο�����[3]�еı�2��ͼ13.��Щ�����ڿռ�ĽǶ�λ�ñ�ʾ�˱��������Ҫ���Ǹõ�ǰ���ĸ��ƵĹ���,��ͼ8.ͼ8�ϼ���·���µ�ÿһ����������־��Dz�ͬ·�ƵĹ���,��ֵ���Ծ��е�λ��ǿ(I=1)�ֲ�������µ�·���������.,
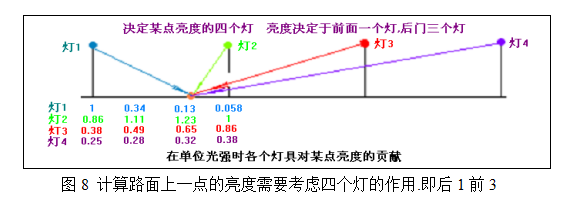
������ͼ8�Ͽ���,�����ȼ���ʱԶ����·�����Ĺ��߲���������ʮ�ֿɹ�.
����Ϊ�˵õ�·�ƵĹ�ֲ�,�ڿ����ĸ�·�����õ�ǰ����,���Բ��õ��ӷ������·�Ƶ��������,������һ���е�·���ߵ�Bƽ���Ͻ���,��ͼ9.ͼ��������֮���ȡ����4��������.
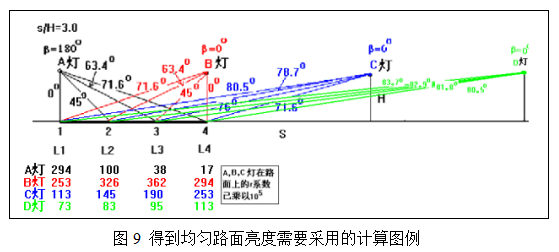
����ʵ�ʼ���ʱ,·���ϵ�ȡ��Ҫ�Զ�,���б���ʽ����֮.
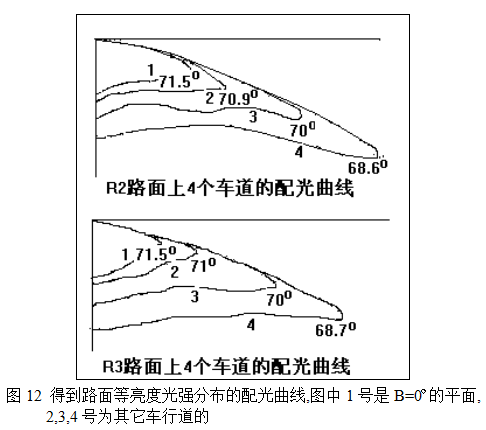
����������õ�����Bƽ���ϵ����������һ��ͼ�м�ͼ12
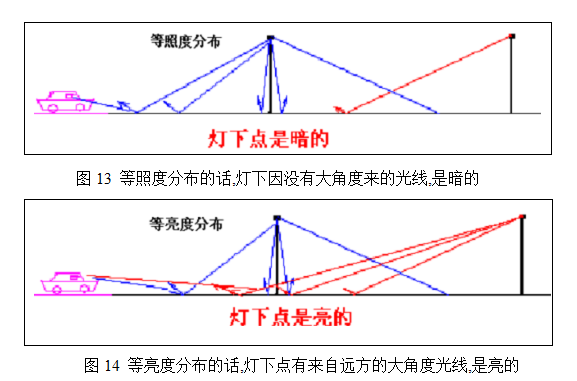
�������ն�����·����·�ϵ�����Ч��������վ��·����Զ��·�����Ч��,��S/H�ϴ�ʱ,�ῴ�����Եİ���������,��ͼ13.������������·��,��Ϊ���µ���������һЩ�ƵĴ�Ƕȹ��ߵIJ���,��������������,��ͼ14.
��������:�õ�·������ȷֲ�����������治ͬ���е��в�ͬ�ķֲ�,��������Ҫ����������.�ر��ǵ��³��е�Bƽ���ϵ����,���������������Ļ�������.
���������
����[1]�º���,���ӱ����ݿ���·���ࡱ.��̼����.No.2.2010.P.6.
����[2]�º���,��·�ƿռ��ǿ�ֲ��ı���:��̼����.No.1.2012.P.22.
����[3]�º���,���նȺ����ȵ���ʶ�ͼ��㡱:��̼����.No.4.2010.P.6.
�����ţ���ICP�� 12048982��-1 ����֧�֣��ֵ¸߿ƣ��������Ƽ�����˾
�й����п�ѧ�о����̼�����о�����